ECE 254 Notes
2016/05/04
L01: Introduction to Operating Systems
-
OS are the programs that interface between hardware and software

-
responsible for resource management and allocation
-
kernel: the central part of the OS; always loaded in main memory
-
systems programming:
-
file manipulation
-
status information
-
programming-language support
-
communication
L02: Review of Computer Architecture
-
to execute a program we need:
-
main memory
-
system bus
-
processor
-
memory ideally should:
-
fast enough processor never has to wait
-
large enough to hold all data
-
inexpensive
-
that doesn’t work in real life – have a memory hierarchy where different types are optimized in certain ways
L03: Operating System Structure and Traps
-
layered OS: clearly defined areas (e.g. interfaces between hardware and kernel, kernel and user space)
-
modules: layers are divided into modules (e.g. module for device driver, scheduling, file system)
-
can be static or modular (loadable and swappable)
Trap
-
software-level interrupt is a trap (also known as exception)
-
usually generated by an error
-
also used to “wake up” the OS - when a program needs the OS to do something, it interrupts and the interrupt handler (part of the OS) does its thing
-
when this happens, mode bit of the processor is set to supervisor mode (as opposed to user mode)
Motivation for Dual-Mode Operation
-
protect system against dumb programs/user
Invoking a System Call
-
user program pushes arguments onto stack
-
invokes system call
-
sys call puts its ID in the designated location
-
sys call issues
trap
-
OS responds to interrupt and examines ID
-
OS runs the sys call handler that matches ID
-
when handler finished, control exists kernel and goes back to sys call (in user mode)
-
sys call returns control to user program
2016/05/09
L04: Processes
-
process:
program in execution; has three things:
-
instructions and data of program (compiled executive)
-
current state of the program
-
any resources needed to execute the program
-
PCB: Process Control Block
-
data structure used for managing processes
-
contains everything OS needs to know about process
-
usually contains:
-
identifier: unique ID (pid)
-
state
-
priority
-
program counter: location to store next instruction address (if needed)
-
register data: place to store current value of registers (if needed); context data
-
memory pointers: pointers to code and data associated with process; any memory the OS has allocated by request
-
I/O status information: outstanding requests, files, or I/O devices currently assigned
-
accounting information: data about process’ use of resources
Process Creation
-
certain events that lead to a process creation:
-
system boot up
-
user requests to start a new process
-
parent process spawns child
-
OS can spawn visible or background processes (daemons in unix)
Process Destruction:
-
happens in four ways:
-
normal exit (voluntary)
-
error exit (voluntary)
-
fatal error (involuntary)
-
killed by another process (involuntary)
Process Family Tree
-
process group: a process and all its descendants
-
signals can be sent to entire process group
-
in UNIX,
init
started first, parent of all processes; UNIX processes can be structured as a tree
-
processes return an exit code
-
when a child finishes, if the parent doesn’t collect its return code, it sits around as a
zombie
-
PCB and resources not cleaned up
-
if parent process dies before child, the child is an
orphan
-
automatically adopted by
init
in unix
-
in Windows, parents can give away their children (there isn’t really a hierachy)
-
in UNIX, you cannot give away your child
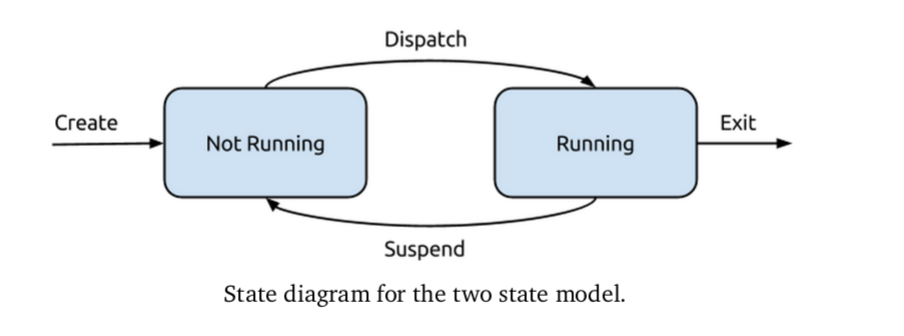
L05: Process State
Two State Model
-
possible states:
-
running: actively executing
-
not running: not currently executing
-
when PCB created, state is
not running
-
whenever process switch happens, current process is set as
running
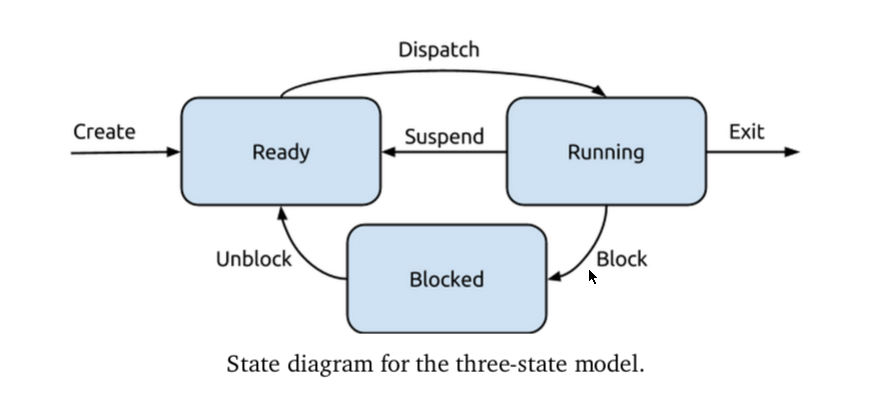
Three State Model
-
possible states:
-
running: actively executing
-
ready: not running, ready to run
-
blocked: not running, not ready until something happens
-
scheduler will never choose a blocked process to run
-
e.g. Say process p is waiting for user input. p is in blocked state. When user enters input, interrupt handler runs and sets state to ready
Five State Model
-
possible states:
-
running: actively executing
-
ready: not running, ready to run
-
blocked: not running, not ready until something happens
-
new: just created, not yet added to list of processes to run
-
terminated: finished executing, not yet cleaned up

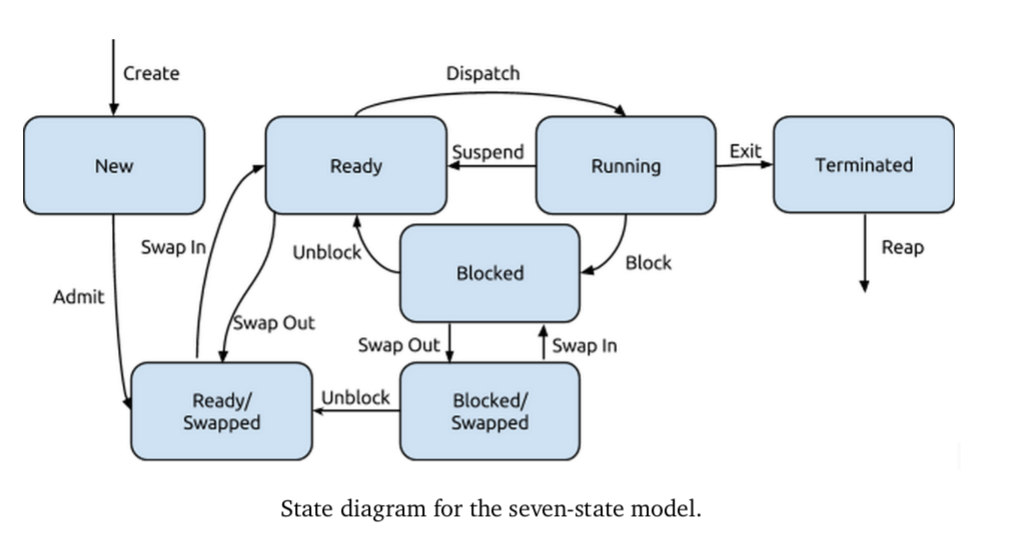
Process on Disk: Seven State Model
-
problem: user might want to run more processes than we have memory for. solution:
-
a process might be swapped out to disk rather than memory
-
need states to recognize process in memory / process in disk
-
by default, process starts out in disk
2016/05/13
L06: Processes in UNIX
-
pid
: process ID
-
interactive vs non-interactive processes
-
zarnett talks about screen and tells you to make multiple screens for different commands. Zarnett is
wrong
-
ctrl+a+c for new windows within session
-
ctrl+a+p, ctrl+a+n for switching between windows
-
boom, screen so much more fucking useful
-
child get resources from parents.
cgroups
can limit process child to x% of resources
-
parent spawns child with
fork
-
uses
wait
to wait for the child return code (not necessary)
-
fork
creates an exact duplicate of parent
-
return value of
fork
tells if parent (positive value,
pid
of child) or child (0 code)
-
child will run
exec
, loads binary file into memory and begin execution
Fork Bomb
-
process that forks itself - each child will also fork itself
-
can overwhelm system with processes
-
ways to limit damage:
-
limit how many processes can exist
-
rate limit creation of processes
L07: Inter-process Communication
-
IPC: communication between 2+ processes that want to co-ordinate/exchange data
-
the OS provides facilities to allow this data
-
processes must have an agreement on:
-
what data a message should contain
-
the way the data is formatted
-
can be synchronous or asynchronous
-
send and receive can be either
Implementation Strategies
-
shared memory
-
the file system
-
message passing
Shared Memory
-
part of memory is designated as being shared between multiple processes, all of whom can rw to it
-
since shared, one process can overwrite changes
-
need a mechanism for co-ordination
File System
-
store messages in the file system
-
persistent
-
can also be used when sender/receiver know nothing about each other
-
still have problem of co-ordination
Message Passing
-
service provided by the OS
-
sender will give the message to the OS and ask it be delivered to a recipient
-
two basic operations: sending and receiving
-
messages can be of fixed or variable length
-
sender needs to know an identifier for another process
-
indirect communication: send message to mailbox, receive mail from mailbox
-
more flexible than identifying process directly
-
anyone can send to mailbox, only owning process can receive
Message Queue
-
use a pipe as a message queue, woo (in UNIX)
-
pipes are unidirectional
-
pipe(int fileDescriptors[])
-
where
fileDescriptors[0]
is the read-end,
fileDescriptors[1]
is the write-end
-
named pipe:
when pipe stored on disk; these are bidirectional
2016/05/16
L08: Threads
-
a process has at least one thread, can have many
-
thread: sequence of executable commands that can be scheduled to run on CPU
-
each thread has its own:
-
thread execution state (running, ready, blocked, etc.)
-
saved thread context
-
execution stack
-
local variables
-
access to memory of process (shared with all threads)
Motivation for Threads
-
faster than creating new process
-
easier to terminate/clean up
-
takes less time to switch
-
share memory space -> communicate directly, no IPC needed
-
allows program to be responsive when a part of the program is blocked
Thread Drawbacks
-
no protection between threads in same process
-
one thread can easily mess with memory
-
if any thread encounters an error, all threads can be terminated by the OS
Thread States
-
each thread has its own state
-
uses the five state model
Thread Cancellation
-
two ways to be cancelled:
-
asynchronous:
one thread immediately terminates the other
-
deferred:
target is informed it is cancelled; target checks for this information, cleans itself up if it has been terminated
-
thread can ignore deferred cancellation, but it is useful when resources need to be properly cleaned up
Thread Types
-
user-level threads (ULTs):
run at the user level
-
OS does not need to support threads; can use a thread library
-
kernel-level threads (KLTs):
run at the kernel level
-
3 possible approaches to types:
-
all threads are user level
-
all threads are kernel level
-
a mix of both approaches
Advantages of ULT
-
thread switches do not require kernel mode privileges; do not have to switch to kernel mode every time
-
scheduling can be decided by program, not OS
-
portability - kernel does not have to support threads
Advantages of KLT
-
no problem with one thread blocking -> all threads blocking
-
(can be a problem with ULT,
jacketing
exists to stop that. Replaces a blocking system call with a non-blocking call from the library)
-
kernel routines can be multi-threaded
The Many-to-One Model
-
ULT-only model
-
many ULTs map to one KLT
-
thread management is done in user space
The One-to-One Model
-
KLT-only model
-
the creation of a new user level thread automatically creates a new KLT
-
approach that Linux and Windows uses
The Many-to-Many Model
-
maps ULTs to a smaller/equal number of KLTs
-
provides maximal concurrency in executing a single program

The One-to-Many Model?
-
DOES NOT EXIST
-
makes no sense for a ULT to be mapped to multiple KLTs
-
ULTs only need KLTs some of the time, having multiple KLTs waiting around is wasteful
L09: POSIX Threads
-
pthread
POSIX standard tells us how threads should work on UNIX OS
-
important calls:
-
pthread_create
: Create a new thread; analogous to
fork
-
pthread_exit
: Terminating the calling thread. Analogous to
exit
, has return value
-
pthread_join
: Wait for another thread to exit. Analogous to
wait
- the caller cannot proceed other thread exists
-
pthread_yield
: Release the CPU, let another thread run.
-
pthread_attr_init
: Create and initialize a thread’s attributes. Contains info like priority of thread
-
pthread_attr_destroy
: Remove a thread’s attributes. Free up the memory holding the attribute info.
-
pthread_cancel
: Signal cancellation to a thread. Can be asynchronous or deferred, depending on thread attributes
Thread Creation in Practice
pthread_create(pthread_t *thread,
const pthread_attr_t *attributes,
void *(*start_routine)(void *),
void *argument);
-
where:
-
thread
is a pointer to
pthread
identifier and will be assigned when the thread is created
-
attr
may contain various characteristics (can supply NULL for defaults)
-
start_rountine
is any function that takes a single untyped pointer and returns an untyped pointer
-
arguments
is the argument passed to
start_routine
-
can be limiting to have just one function parameter
-
can define a structure, pass a pointer to that struct to the function
Thread Attributes
-
indicate the following attributes of a thread:
-
detached or joinable state
-
scheduling data (policy, parameters, etc.)
-
stack size
-
stack address
-
by default, new threads are joinable. Can be started in a detached state to stop it from ever being joined
Fork
and
Exec
-
when
fork
is run, it makes a copy of all the threads. The child may then call
exec
, and throw all away the threads
-
can have 2 different implementations of
fork
:
-
one that will duplicate all threads
-
one that will duplicate only the executing thread
UNIX Signals
-
UNIX systems use signals to indicate events
-
are essentially interrupts with an integer id
-
synchronous signals:
signal occurs as a result of program execution (e.g. dividing by zero)
-
asynchronous signals:
signal comes from outside the process (e.g. Ctrl+C)
-
in a multi-threaded program - which thread to send signal to?
-
deliver to the thread to which the signal applies
-
deliver to every thread
-
deliver to certain threads in the process
-
assign a specific thread to receive all signals
-
sync signals will always be sent to the thread that triggered the signal, but async signals can be handled in any of the 4 ways
Thread Cancellation
-
pthread_cancel
: takes one parameter, the thread ID. Set up for deferred cancellation by default
-
pthread_testcancel
: check if thread has been cancelled
L10: Symmetric Multiprocessing (SMP)
-
A SMP system is a stand-alone computer with the characteristics:
-
>=2 general processors
-
processors share the same main memory and I/O devices and are interconnected by a bus
-
processors are capable of performing the same functions
-
system is controlled by an OS that provides interaction between processors and their programs
Time Slicing
-
CPU switches between tasks real quickly to make it seem like processes are executing in parallel
Parallelism and Speedup
-
fully parallelizable: splitting up task can double speed of execution
-
partially parallelizable: splitting up task can improve speed of execution; <2 times
-
non-parallelizable: splitting up task does not improve speed at all
Amdahl’s Law
$$ speedup \leqslant \frac{1}{S + \frac{1-S}{N} } $$
- can take limit to infinity and see what speedup converges on
L11: Concurrency: Synchronization and Atomicity
-
serialization:
want to ensure that certain events take place before other certain events
-
mutual exclusion:
certain events must not happen at the same time
-
concurrent:
two events are concurrent if we cannot tell by looking at the program which will happen first
-
order might change => nondeterminism
-
atomic operation:
an operation that is incapable of being interrupted; non-atomic operations leads to race conditions and sadness
Serialization through Messages
-
if event B has to wait for event A to finish before starting, having event A send a message to B when done
Mutual Exclusion Through Flags
-
critical section:
a section of code that should only be accessed by at most one thread at a time
-
protect them with mutexes (mutual exclusion)
-
make critical sections as short as possible
Test and Set
-
how to implement mutual exclusion?
-
hardware solution - Test and Set!
-
special machine instruction that is performed in a single instruction cycle (therefore not interruptible)
-
test and set returns a boolean value
-
will examine the flag variable and if 0, will set to 1 and return true. If set to 1, will return false
L12: Semaphores
Mutual Exclusion through Messages
-
more useful properties than just one thread being in the critical thread at a time
-
mutual exclusion must apply
-
a thread that halts outside the critical section must not interfere with other threads
-
not possible for a thread requiring critical section to be defined indefinitely
-
when no thread is in the critical section, thread requesting access should get it right away (no unnecessary waiting)
-
no assumptions are made about what the threads do or number of processors (general solution, not special case solution)
-
a thread remains inside the critical section for finite time
Semaphore
-
semaphore: generally, is a system of signals used for communication
-
binary semaphore: variable that can be 0 or 1
-
has two operations:
wait
and
signal
-
wait
: how to enter critical section; if =1, set to 0 and enter thread; if =0, block
-
signal
: if =1 when called, do nothing; if =0 when called and a task is blocking, unlock task; otherwise set to 1
-
no facility to “check” its value. You just call
wait
and what will happen, will happen
-
in this definition, nothing stops another thread from signalling (not the thread using the critical thread), letting threads in the critical section
Mutex
-
mutex: binary semphore with one additional rule: only the thread that called
wait
can call
signal
Counting Semaphores
-
counting/general semaphore: instead of 0 or 1, setup takes an int and that’s the max value.
-
waiting thread will decrement by 1
-
signalling thread will increment by 1
-
if decrementing would make semaphore <=0, is blocked
L13: Synchronization Patterns
-
common sync patterns that semaphores can be used to solve
-
ways of coordinating 2 threads/processes
Signalling
-
tell someone you did a thing
-
semaphore sem, initialized to 0
-
ensures that statement A1 will occur before statement B2
Thread A
1. Statement A1
2. signal(sem)
Thread B
1. wait(sem)
2. Statement B2
Rendezvous
-
expansion of signalling so that it works both ways: tell someone you did a thing and they tell you you did a thing and then you’re at the same place
-
in the following: A1 and B1 happen before A2 and B2
Thread A Thread B
1. Statement A1 1. Statement B1
2. signal(aArrived) 2. signal(bArrived)
3. wait(bArrived) 3. wait(aArrived)
4. Statement A2 4. Statement B2
Mutual Exclusion
-
in the following: mutex initialized to 1, first thread to arrive doesn’t block on wait
Thread A Thread B
1. wait(mutex) 1. wait(mutex)
2. critical section 2. critical section
3. signal(mutex) 3. signal(mutex)
Multiplex
-
same as mutex pattern with
n
threads allowed in critical section at a time
Barrier
-
generalization of rendezvous where
n
threads need to meet up
-
useful to have a variable to keep track of how many threads are in the right place (since it’s shared data, should be protected as a critical section)
Thread K
1. wait(mutex)
2. count++
3. signal(mutex)
4. if count == n
5. signal(barrier)
6. end if
7. wait(barrier)
8. signal(barrier)
-
n
th thread will unlock the semaphore on line 5, every other thread will signal another thread at line 8
The Reusable Barrier
-
in the barrier pattern, count can not decrease so it’s an one-time use barrier
Thread K
1. wait(mutex)
2. count++
3. if count == n
4. wait(turnstile2)
5. signal(turnstile1)
6. end if
7. signal(mutex)
8. wait(turnstile1)
9. signal(turnstile1)
10. [critical section]
11. wait(mutex)
12. count--
13. if count == 0
14. wait(turnstile1)
15. signal(turnstile2)
16. end if
17. signal(mutex)
18. wait(turnstile2)
19. signal(turnstile2)
-
above is a
two-phase barrier
, because all threads have to wait twice, once at each turnstile
L14: Classical Synchronization Problems
Producer-Consumer Problem
-
n
processes share a common buffer that is of fixed size
-
p
producers put data in,
c
consumers take data out
-
in order to keep track of the # of items in the buffer, we have a variable
count
Producer Consumer
1. [produce item] 1. wait(items)
2. wait(spaces) 2. wait(mutex)
3. wait(mutex) 3. [remove item from buffer]
4. [add item to buffer] 4. signal(mutex)
5. signal(mutex) 5. signal(spaces)
6. signal(items) 6. [consume item]
Readers-Writers Problem
-
concurrent reading and modification of a data structure or record by more than one thread
-
any number of readers may be in the critical section simultaneously
-
only one writer may be in the critical section (and when it is, no readers allowed)
Writer Reader
1. wait(turnstile) 1. wait(turnstile)
2. wait(roomEmpty) 2. signal(turnstile)
3. [write data] 3. wait(mutex)
4. signal(turnstile) 4. readers++
5. signal(roomEmpty) 5. if readers == 1
6. wait(roomEmpty)
7. end if
8. signal(mutex)
9. [read data]
10. wait(mutex)
11. readers--
12. if readers == 0
13. signal(roomEmpty)
14. end if
15. signal(mutex)
Dining Philosophers Problem
-
5 people at a table, 5 chopsticks
-
when they want to eat, they attempt to grab 2 nearest chopsticks (left, right). Then they can eat rice. When they’re done, put down the chopsticks
-
chopstick = binary semaphore
-
if they all try to eat at once, they all grab left chopstick. None can grab the right.
-
could protect entire table with a semaphore - only one can eat at a time. This works but suboptimal
-
can limit to 4 philosophers. k pigeonholes, k+1 pigeons - someone must have at least two pigeons
L15: Deadlock
-
permanent blocking of a set of processes that compete for system resources
-
only really deadlock when blocked, waiting for event that comes from another blocked process (therefore event will never happen)
-
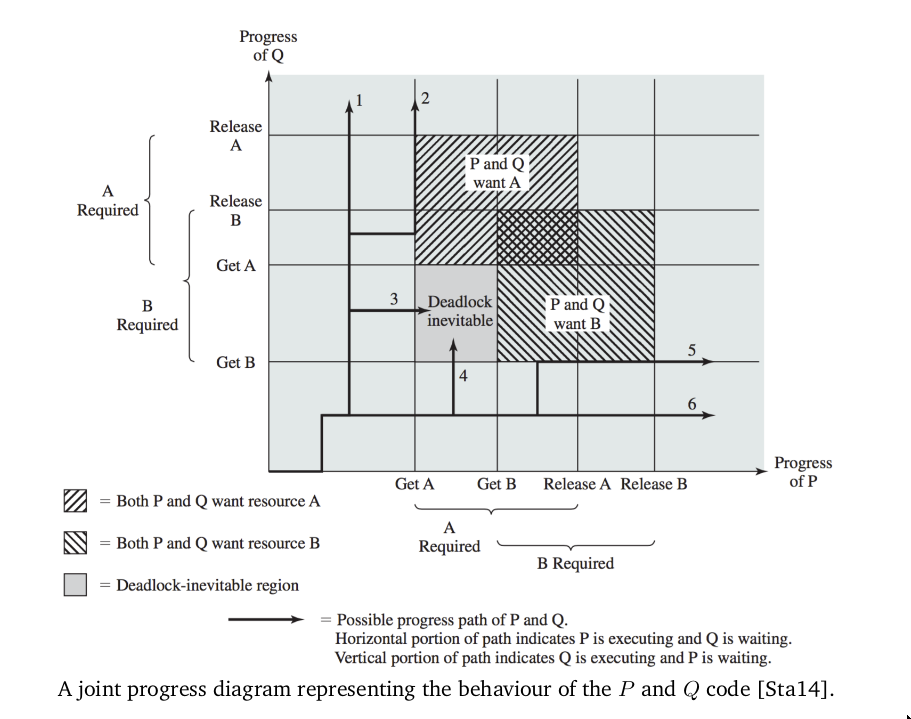
deadlock example:
Thread P Thread Q
1. wait(a) 1. wait(b)
2. wait(b) 2. wait(a)
3. [critical section] 3. [critical section]
4. signal(a) 4. signal(b)
5. signal(b) 5. signal(a)
-
execution paths:
-
Q gets B and A, releases. P gets both and releases
-
Q gets B and A. P blocks on A. Q releases B and A. P gets A, B, releases.
-
Q gets B, then P gets A. Deadlock.
-
P gets A, then Q gets B. Deadlock.
-
P gets A, and then B. Q blocks on B. P releases A and B. Q gets B, A, releases.
-
P gets A and B, releases. Q gets both and releases.
-
fatal region = deadlock inevitable region
Reusable and Consumable Resource
-
reusable: can be used by one process at time, not depleted
-
consumable: created and destroyed upon consumption
Conditions for Deadlock
-
mutual exclusion: only one process can use at once
-
hold-and-wait: a process holding a resource may request more resources and be forced to wait for them
-
no preemption: a resource cannot be “taken” from the process that holds it
-
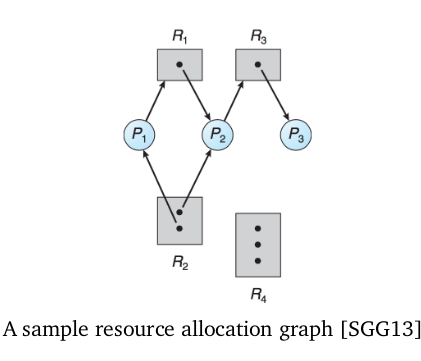
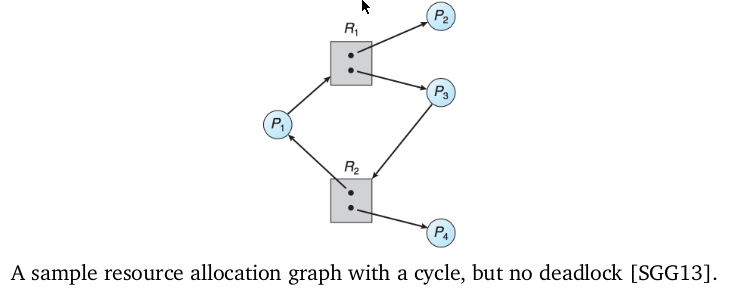
circular wait: a cycle in the resource allocation graph

Dealing with Deadlock
-
approaches:
-
ignore it
-
deadlock prevention
-
deadlock avoidance
-
deadlock detection
Ignore It
Deadlock Prevention
-
need to get rid of one of the conditions:
-
mutual exclusion
-
throwing out the baby with the bathwater
-
hold-and-wait
-
request all resources at once.
-
process needs to know all resources it needs at the beginning
-
process can’t start until it has all resources - will need to wait until it starts
-
process keeps the resources longer than it needs
-
release all resources when you need to request a new one, and then request all again
-
some things cannot be easily released (e.g. memory). Thus, cannot guarantee no deadlock will happen, just makes it less likely
-
two-phase locking
: process attempts to lock a group of resources; if it can’t, it’ll release them all and try again. -> works but doesn’t fit into our model of semaphores
-
no-preemption:
-
if process is waiting for a process and also holding resources, another process can take those resources and they’re added to the list of things they’re waiting for
-
for this to work, resource must be something whose state can be easily saved and restored -> some resources do not work like that
-
therefore not sufficient to get rid of deadlock, only makes it less likely
L16: Deadlock Avoidance
Ordering of Resources
-
resources given some order, they must be requested in that order
Stay Alert Stay Safe
-
process gives OS some info about resource they might need. OS tries to schedule things such that a deadlock cannot happen
-
OS needs information about how to pick a “safe” route
-
resource allocation diagram:
shows how many instances of resource all processes have, how many they need before finishing, how many are free
-
to see if a set of requests are safe, see if there is any path that guarantees all processes going to completion
-
a system being unsafe does not mean deadlock is certain - it is just possible
Resource-Allocation-Graph Algorithm
-
have OS maintain a resource allocation graph so it can avoid cycles
-
this works if there is only one instance of a resource and requires all resources be declared in advance
-
graph has 3 types of edges:
-
requests
-
allocation
-
claim (resource may request a resource)
-
allocation only allowed if it does not result in a cycle in the graph
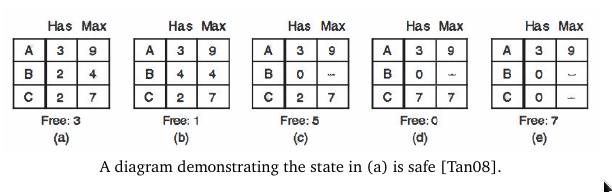
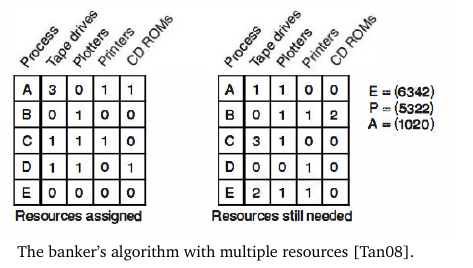
Banker’s Algorithm
-
OS will use the resource allocation diagrams from earlier to evaluate if any resource request will transition the system to an unsafe state
-
if it would, request will be denied or process will be blocked
-
resource allocation diagram can accommodate multiple resources, as below
-
informal method for check if state is safe:
-
Look for a row in matrix,
r
, where the unmet resource needs are less than or equal to available resources in A. If not such row exists => unsafe
-
Assume the process from
r
gets all the resources it needs. Mark as terminated, put all resources in A
-Repeat steps until a) all processes are marked terminated and state is safe or b) no process remains whose needs can be met and the state is unsafe
-
while useful in theory, in practice is useless since processes rarely know their max resource needs in advance and number of processes is not fixed
Other Recommendations
-
minimize # of critical sections and length
-
all tasks must release resources asap
-
do not suspend/block tasks in the critical section
-
all critical sections must be error-free
-
do not allocate resources in interrupt handlers. Could block, entire system could go down
-
always perform validity checks on pointers (or null checks) in critical sections. Seg fault or exception might mean never releasing the lock
L17: Deadlock Detection and Recovery
General Deadlock Detection Algorithm
-
n processes numbered P
1
through P
n
and m resources
-
resources represented by:
-
E, existing resource vector - total number of instances of each resource
-
A, available resource vector - how many instances available
-
use two matrices to represent current situation of system
-
C, current allocation: contains data about what resources assigned to each process
-
row
i
of C shows how many of each resource P
i
has
-
R, request matrix
-
row
i
of R shows how many of each resource P
i
wants
-
column j is a certain resource
$$ \sum_{i=1}^{n} C_ij + A_j = E_j $$

Algorithm (ϴ(m * n
2
)
-
Search for an unmarked process whose requests can all be satisfied with available resources in A
-
Find a process P
i
such that row R
i
<- A
-
If a process is found, add the allocated resources of that process to the available vector and mark the process.
-
A = A + C
i
. Go back to step 1
-
If no process was found in the search of step 1, algorithm terminates
When to Detect Deadlock
-
deadlock detection expensive to run - so when should we run?
-
could run every time a resource request cannot be granted (process gets blocked)
-
could run periodically
-
depends on:
-
how often we expect deadlock to occur
-
how severe a problem it is when deadlock occurs
Deadlock Recovery
-
manual strategy: someone is notified, responsible for
Robbery
-
preemption - after detection, OS preempts resources and gives them to other processes until deadlock is solved; resource must be able to save and restore its state for this to work.
Mass murder
-
kill all processes involved in the deadlock, all resources become available
-
may not solve the problem for reals because the circumstances may happen again
Murder
-
just kill one of the processes involved in the deadlock, see if that fixes the problem
Time Travel
-
rollback: returning the state of the process to a saved state from an earlier time
-
saved state = checkpoint
-
act of creating and saving a checkpoint = checkpointing
-
checkpoints may be created periodically or before beginning a particular operation that uses a lot of resources
-
sometimes rolling back does not save us from deadlock happening again
-
can attempt a few time before giving up and trying something else
Armageddon
-
sometimes the best thing to do is reboot the system
-
NASA’s spirit rover does this (lol)
Victim Selection
-
it is not necessary to choose a process involved in the deadlock
-
if P1 and P2 are deadlocked, P3 may have an instance P1 needs. Killing P3 will let P1 and P2 proceed
-
can think of this as an optimization problem - you can define a cost function for this, eval it, choose the lowest
-
some factors to consider:
-
the priority of the process
-
how long the process has been executing
-
how long is remaining in execution, if known
-
what resources the process has (number and type)
-
future resource requests, if known
-
whether the process is user-interactive or in the background
-
how many times, if any, the process has been selected as a victim
-
tends to favour older processes to persevere over younger
-
less work is lost
-
if oldest process is always selected, they might starve and never run to completion
-
keeping track of victim selection helps prevent starvation
Miscarriages of Justice
-
deadlock detection algorithm tends to be conservative in that it will err on the side of saying that there is a deadlock
-
the algorithms do not have to be perfect if we have chosen an appropriate recovery strategy
L18: Concurrency and Synchronization in POSIX
Concurrency with
pthreads
-
pthread
routines to deal with mutual exclusion
-
pthread_mutex_init
:
-used to create a new mutex variable and returns it with type
pthread_mutex_t
-
takes an optional param, the attributes or can initialize with null or with the default initializer:
-
pthread_mutex_t mymutex = PTHREAD_MUTEX_INITIALIZER;
-
when created, the mutex is by default unlocked
-
pthread_mutex_unlock
: unlocks selected mutex
-
pthread_mutex_lock
: blocking lock function
-
pthread_mutex_trylock
: non-blocking lock function (get back a result that tells you if you got the lock or not)
-
attempting to unlock a mutex that is not currently locked is a error, or if you attempt to unlock a mutex owned by another
-
pthread_mutex_destroy
: cleans up the mutex, destroys it.
-
may fail if mutex is locked - attempting to destroy a locked mutex will result in “undefined behaviour”
Condition Variables
-
condition variable allows synchronization based on the value of the data
-
think of condition variable as an “event”, similar to but different than a counting semaphore
-
pthread_cond_init
: creates a
pthread_cont_t
-
pthread_cond_destroy
: to destroy them
-
condition variables must be paired with a mutex
-
will release the mutex while it waits for the condition
-
when the condition is true, the mutex is automatically locked and the thread can proceed
-
mutex should be unlocked when done with it
pthread_cond_wait
: takes the condition variable and the mutex. Performs the above behaviour
-
pthread_cond_signal
: signals a provided condition variable
-
thread_cond_broadcast
: signals all threads waiting for the condition variable
Monitors
-
can be made using condition variables
-
objective of the monitor is to make it so programmers do not need to code the synchronization part of their code directly
-
example:
synchronized
keyword in Java (used to ensure only one thread can be inside a method/block at a time)
Concurrency Mechanisms in UNIX
-
UNIX has a general semaphore
-
maintains the following data:
-
value of semaphore
-
process ID of last process to access it
-
# of processes waiting on a number > than the current value
-
# of processes waiting for the value to be 0
-
created in sets of 1 or more
-
sem_op
: system call for semaphore operations
-
positive - ++ value of semaphore, wake up processes waiting
-
0 - if current value is 0, do nothing. else, block until it’s 0 and increment # of processes waiting for it be 0
-
negative and its absolute value < current value - add
sem_op
to the current value
-
negative and its absolute value > current value - block until value is increased, ++ # of processes waiting for value > current value
Linux Kernel Concurrency Mechanisms
Atomic Operations
-
kernel provides operations that are guaranteed to executive atomically
-
two types: those that operate on ints, those that operate on a single bit in a bitmap
-
there is a defined type
atomic_t
, ensuring that only atomic operations can be used on this data type and vice versa
Spinlocks
-
way to implement constant checking for a lock
-
implemented as an int. If int=0, lock by setting to 1. If int=1, check its value again
-
this is pretty inefficient lol except for when waiting would take less time than context switching
-
reader-writer spinlock: allows multiple readers but gives exclusive access to a writer
-
implemented as a 24-bit reader counter and unlock flag, with the meaning defined as:
|
Counter
|
Flag
|
Interpretation
|
|
0
|
1
|
The spinlock is released and available
|
|
0
|
0
|
The spinlock has been acquired for writing
|
|
n (n>0)
|
0
|
The spinlock has been acquired for reading by n threads
|
|
n (n>0)
|
1
|
Invalid state
|